Balise "Parapluie" pour le robot
Pourquoi une balise :
Lors de la coupe de France de robotique, il est important de détecter le robot adverse, pour éviter de le percuter. Après de mauvaises expériences avec les ultrasons (pas de détection du robot adverse, ou détection intempestive), nous avons décidé d’utiliser un système de détection du robot adverse plus fiable : la balise parapluie.
Merci à l’équipe Les Cools Girls pour nous avoir autorisé à copier l’idée de la balise : le principe du parapluie.
Fonctionnement de la balise :
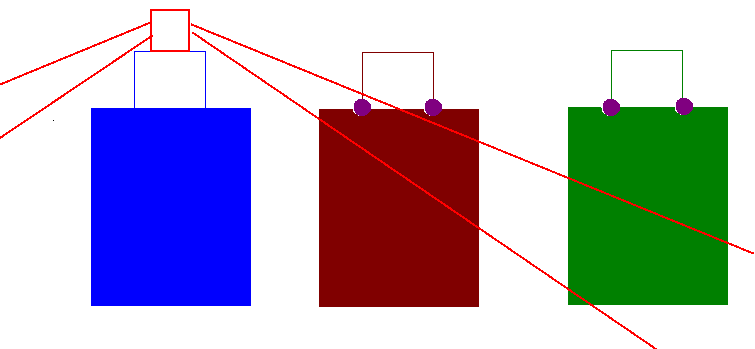
Le principe de cette balise est simple. Le schéma représente son fonctionnement (il faut me pardonner, je ne suis pas un expert de Paint …).
La balise (en rouge) posée sur le robot adverse (en bleu) créé un cône de lumière qui part du haut du robot jusqu’au sol. Lorsque notre robot est suffisamment loin du robot adverse (robot vert), le détecteur de balise (en violet) situé en haut de notre robot ne rentre pas dans le cône de lumière. Et donc, nous pouvons continuer notre petit bout de chemin. En revanche, si nous nous rapprochons du robot adverse, nos détecteurs vont entrer dans le cône de lumière (robot rouge) et dans ce cas, nous devons éviter le robot adverse.
Tout les programmes, schémas, cartes électroniques, et plans mécaniques (STL) sont disponibles sur le dépôt github suivant : https://github.com/gobgob/balise
Codage de l’information
Pour éviter les fausses détections, un codage a été installé entre l’émetteur (sur le robot adverse) et le récepteur (sur notre robot). Ce codage est simple : au lieu d’éclairer en continu, la balise émet un signal à une fréquence choisie. Le récepteur lui, après application de filtre sur le signal, regarde si cette fréquence arrive. Ainsi, la lumière ambiante ne devrait pas nous perturber (en tout cas, c’est la théorie).
Emetteur
Pour la partie émettrice (la balise que l’on pose sur le robot adverse), l’électronique est très simple. En revanche, il y a quelques pièces mécaniques à imprimer pour avoir un bon cône de lumière.
Mécanique
Les contraintes mécaniques sont simples, pouvoir intégrer un support de 8 piles AA (ou une pile 9V), avoir des dimensions de 8cm x 8cm x 8cm, avoir un interrupteur facile d’accès, de maintenir la carte électronique en place et d’avoir un support pour les 16 LEDs de 5mm de diamètre bien réparties.
Toute la mécanique a été fabriquée à l’imprimante 3D. Vous pouvez trouver les plans aux formats STL et solidworks sur ce lien Plan mécanique de la balise
Electronique
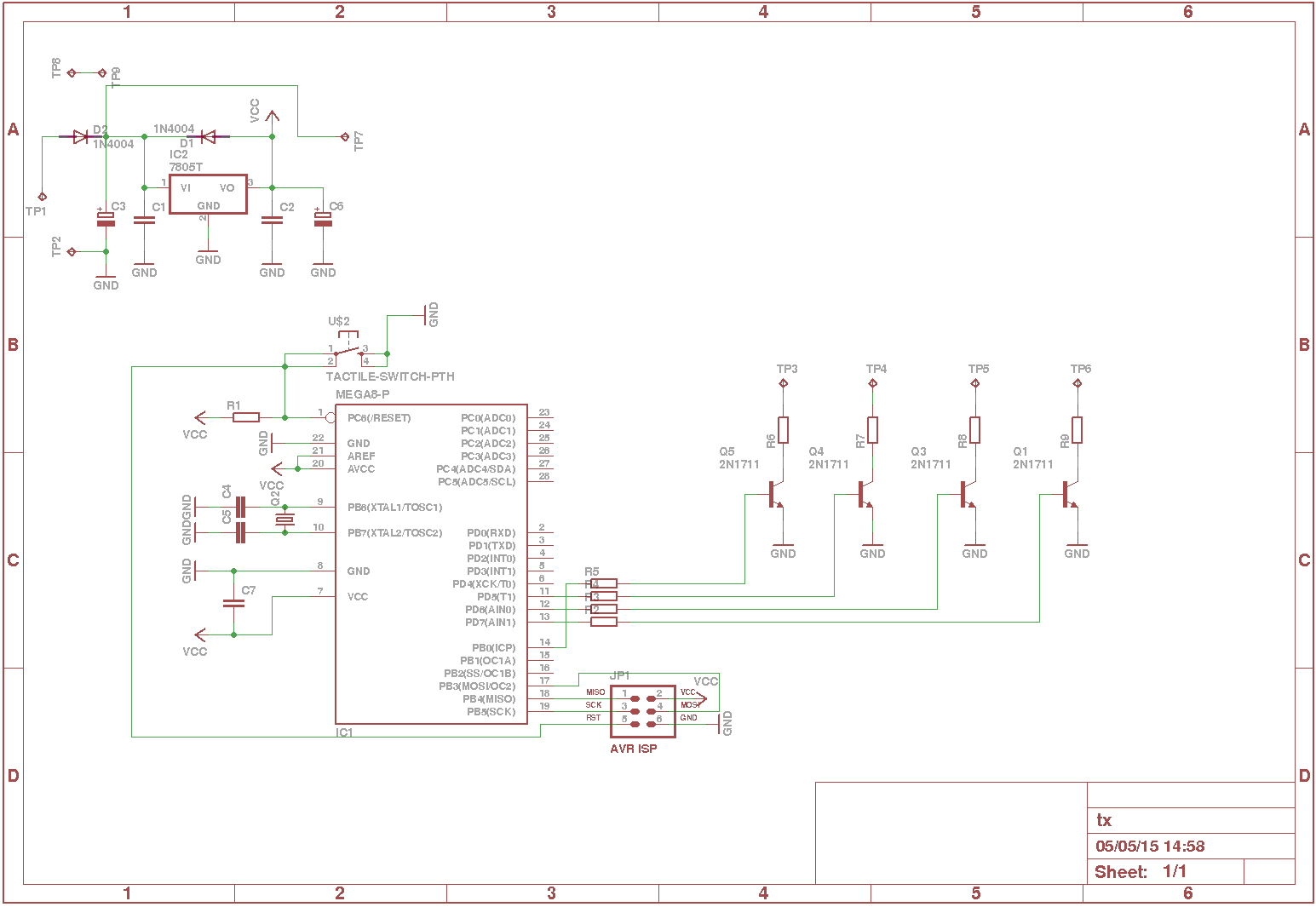
Le principe est de faire clignoter rapidement les LEDs pour coder le signal à une fréquence donnée. Pour cela, un NE555 aurait pu faire l’affaire, mais pour pouvoir choisir la fréquence facilement et de manière précise (entre 1 et 5 kHz), le choix a été de mettre un microcontrôleur (ATmega328p).
Les 16 LEDs (Datasheet) ne sont pas représentées sur le schéma. Elles sont montées en série (4 x 4 LEDs avec une résistance visible sur le schéma) et commandées par un transistor (2N1711 ou 2N2222). Ce qui est important, c’est d’avoir des LEDs haute luminosité (nous avons des LEDs 30000 mcd acheté sur ebay par paquet de 100).
Programmation
Il s’agit simplement d’un programme qui doit faire clignoter les LEDs à une fréquence bien définie (dans notre cas, 1464Hz).
Une petite subtilité a été ajoutée : nous n’allumons pas les LEDs toutes en même temps, mais chacune leur tour (par série de 4). Ainsi, les LEDs sont allumées un quart de période, et il y a toujours une série de LED allumée. Cela permet de réguler la consommation de courant électrique (probablement inutile étant donné la faible consommation des LEDs, mais c’est fun).
Le programme est disponible ici
Récepteur
Cette partie est uniquement constituée d’électronique et de programmation. Il n’y a pas de mécanique, et il faut faire rentrer (comme on peut) les cartes électroniques dans le robot :)
Au début, pour décoder le signal et savoir si la fréquence choisie à l’émetteur était présente, nous avons testé des filtres. Et malgré plusieurs nuits blanches, cela n’a pas fonctionné. Les filtres auto-oscillaient ou ne fonctionnaient pas, etc … (et pourtant, j’ai fait et refait les calculs plein de fois, et tout était bon). Plutôt que de s’acharner sur les filtres analogiques, j’ai choisi l’option Fourier (Transformée de Fourier Discrète).
Electronique
Le fait d’avoir un système filtre numérique simplifie grandement l’électronique.
Le schéma commence avec l’ampli-op IC2 pour créer une masse virtuelle (via le pont diviseur de tension R1 et R2).
Ensuite, nous avons une chaine d’amplification complète constituée de :
- Un suiveur pour adapter l’impédance entre le capteur (la même LED que l’émetteur) et le reste du circuit (IC1A).
- Un condensateur pour couper la partie continue du signal et garder que les variations de tension (C5).
- Un premier amplificateur de 470 environ (IC1B, R4 et R5).
- Un filtre passe bas RC de fréquence de coupure d’environ 30kHz (ICA3, R6, C8).
- Un dernier amplificateur réglable (IC3B et R3)
- Enfin, un pont diviseur de tension pour rendre le signal allant de 0 à 12V en sortie de l’ampli-op (par rapport à la vrai masse) à des tensions comprises entre 0 et 5V.
Et cette sortie rentre directement dans l’entrée analogique d’un arduino.
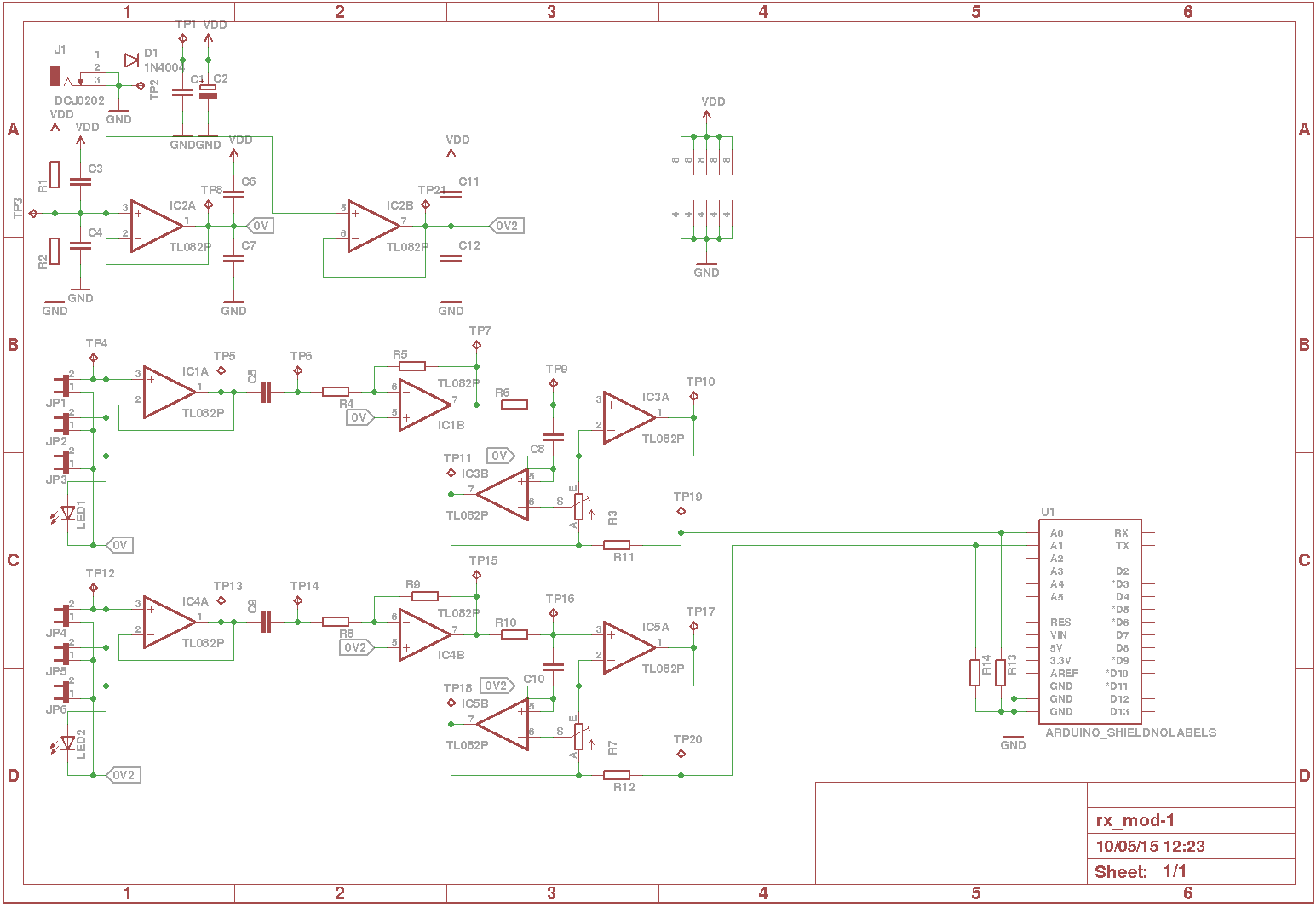
Pour résumer le schéma électronique, il y a juste une série d’amplificateurs et filtres simples (couper la composante continue et les signaux de trop haute fréquence) avant d’envoyer le signal dans l’entrée analogique d’un arduino.
Dans les tests en laboratoire (de fortune), le signal après amplification (avant d’entrée dans le microcontrôleur) est soit :
- Un créneau saturé à 30kHz (je ne sais pas pourquoi, signal parasite).
- Un créneau saturé à 30kHz et un autre saturé à 1464Hz (donc 2 signaux, dont celui qu’on veut détecter).
La programmation
Voila la partie la plus intéressante de la balise.
Fourier
La transformée de Fourier permet de transformer un signal temporel (tension qui dépend du temps) en un signal fréquentiel (amplitude qui dépend d’une fréquence). La TFD (Transformée de Fourier Discrète) permet de faire la même chose que la transformée de Fourier en échantillonnant un signal (voir article wikipédia sur la TFD ).
Les premiers essais de TFD ont été faits avec un tableur : Simulation d’une sinusoïde échantillonnée, calcul des coefficients de Fourier, et tests de changement de fréquence. Les résultats étant intéressants, l’algorithme a été implémenté sur un ATmega328p.
Le programme
Le programme est disponible sur le github. Il est constitué de plusieurs fichiers :
- tim0.c / tim0.h : Permet de configurer le timer pour générer une interruption au CAN (Convertisseur Analogique Numérique) à une fréquence de 62.5kHz
- adc.c / adc.h : Configuration du CAN pour faire une conversion à chaque fois que le Timer0 génère un overflow.
- io.c / io.h : Permet de configurer et contrôler les IOs (Input Output) externes pour signaler la présence ou non de la balise, et faire du debug (ça peut toujours servir).
- sin_table.c / sin_table.h : Table de sinus et cosinus pour le calcul de la transformée de Fourier
- fft.c / fft.h : C’est dans ces fichiers que se trouve l’algorithme.
- main.c : contient le main, qui ne fait que comparer le résultat de la TFD avec une constante pour savoir si il y a présence ou non du signal.
L’échantillonnage
Pour échantillonner de manière régulière (c’est très important que ce soit régulier), nous utilisons le Timer 0. Lorsque celui-ci overflow, il est configuré pour lancer automatiquement une conversion Analogique Numérique. Lorsque celle-ci est finie, elle génère une interruption pour stocker le résultat dans un tableau circulaire.
Ainsi, nous avons l’acquisition qui se fait de manière régulière (via Timer) et sans prendre du temps processeur (tout est transparent et utilise les interruptions).
L’algorithme
L’algorithme est dans la fonction fft_compute_fft. La première chose que l’on fait, c’est de copier le tableau de valeur échantillonnée (en désactivant les interruptions) pour pouvoir travailler en local sans avoir des valeurs modifiées en cours de calcul par l’échantillonnage (qui continue de fonctionner en parallèle).
Ensuite, nous appliquons la formule (en utilisant un tableau de sinus et cosinus pré-calculé).
Et on retourne le résultat (élevé au carré pour ne pas perdre de temps à calculer la racine).
Le main
Le programme main est très simple. On initialise tout les modules et, en boucle, on compare le résultat de notre calcul avec une valeur prédéfinie. Si le résultat est plus grand que la valeur prédéfinie, c’est que la fréquence pour laquelle nous avons fait le calcul est présente. Et en fonction, on met un IO à 1 ou 0 logique pour le signaler au processeur qui contrôle le robot.
Résultat et optimisation
Résultats
Les tests effectués dans le laboratoire (toujours de fortune) sont concluants. Malgré la présence de bruit amplifié, on détecte bien la présence (ou pas) du signal voulu : 1464Hz.
Le calcul est un peu lent sur un ATmega (environ 10 calculs par seconde avec 128 points) mais suffisant pour la coupe.
Malheureusement, à cause d’un manque de temps à la coupe (petit robot à débuguer, chorégraphie à faire pour le gros robot, coupe off à préparer, etc …), nous n’avons pas pu intégrer le module balise (fait à Montpellier) dans le robot (fait à Paris). Peut-être l’année prochaine …
Optimisation
Les premiers tests étaient extrêmement lents. L’ATmega n’aimait pas calculer autant de sinus et cosinus, donc la première optimisation a été de créer une table de sinus et cosinus pour simplifier les calculs au processeur.
On peut aussi réduire le nombre de points pour le calcul (on perd en précision, mais on gagne en temps).
Une autre optimisation consiste à changer la fréquence du quartz (overclocker l’ATmega de 16MHz à 20MHz). Ou encore mieux, passer sur un processeur ARM 32 bits bien plus rapide (comme utiliser une teensy 3.1 ou un arduino Due).
A venir
Quelques tests ont été effectués sur un arduino Due pour un autre projet. C’est beaucoup plus rapide (environ 250 calculs par seconde pour 256 points et une fréquence d’échantillonage de 100kHz). Mais ça, c’est pour d’autres articles (TFD et projet mystère) …